______________________________
After looking at a number of recent papers on magnetometer calibration, I have decided on the following path to improve the calibration of a custom compass under development.
It is based on the availability of a PC software tool called MagCal.exe, developed by the PLAN Research Group at the University of Calgary, Alberta, Canada.
First, here is how to get the software:
1. Go to their website: http://plan.geomatics.ucalgary.ca/
2. On their menu bar, select Research, then Publications
3. Type MagCal in the Search Criteria textbox, then click on the ‘Search’ button.
4. Right click on ‘Download Executable’, then pick ‘Save target as…’ in the pop-up menu
5. Save the MagCal.zip file on your machine
6. Unzip, and you are ready to go.
You can also download the PDF paper on which the software is based at the same location.
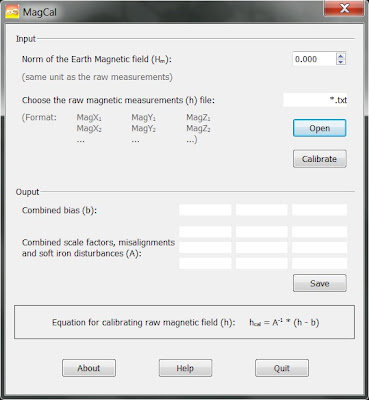
So what MagCal exactly does? As stated in the about box: “This code computes the calibration parameters of a tri-axis magnetometer”.
From an input file containing raw measurement of the magnetometer, it finds 12 calibration values that correct for a whole set of errors: bias, hard iron, scale factor, soft iron and misalignments. Note that you will have to invert a 3x3 matrix result (there are online tools for that). What they don’t tell is that the same software can also be used to calibrate the accelerometer for bias, scale factor AND misalignments.
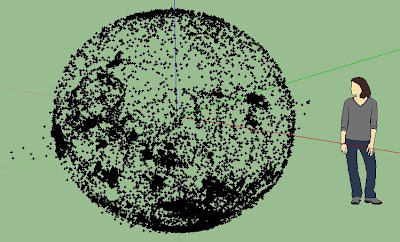
Here is a rendering (using Google SketchUp) of the example raw data file provided with the MagCal software.
The whole idea is to first make this calibration on the completed compass in a magnetic clean environment (like an exterior isolated field).
The whole calibration procedure will be like this:
1. Record a set of static measurements (magnetometer and accelerometer) by positioning the compass in a large number of orientiations covering a whole sphere
2. Process the data in MagCal to find the calibration values (12 each for the magnetometer and the accelerometer)
3. Carefully position the compass assembly completely horizontal (use a precision level).
4. Record the accelerometer output at this position, to find the orientation of the accelerometer versus the whole compass assembly. This will be used to apply a final correction to the calibrated accelerometer values before applying the tilt compensation equations.
Note that once the compass will be installed in the boat, there may be additional hard and soft iron errors induced by the boat structure and equipment. These will be later identified with the help of the GPS, as shown in a previous post.
In Part 2 of this post, I present 'Magneto', a similar software tool which has some practical advantages compared to 'MagCal'.
It is based on the availability of a PC software tool called MagCal.exe, developed by the PLAN Research Group at the University of Calgary, Alberta, Canada.
1. Go to their website: http://plan.geomatics.ucalgary.ca/
2. On their menu bar, select Research, then Publications
3. Type MagCal in the Search Criteria textbox, then click on the ‘Search’ button.
4. Right click on ‘Download Executable’, then pick ‘Save target as…’ in the pop-up menu
5. Save the MagCal.zip file on your machine
6. Unzip, and you are ready to go.
You can also download the PDF paper on which the software is based at the same location.

So what MagCal exactly does? As stated in the about box: “This code computes the calibration parameters of a tri-axis magnetometer”.
From an input file containing raw measurement of the magnetometer, it finds 12 calibration values that correct for a whole set of errors: bias, hard iron, scale factor, soft iron and misalignments. Note that you will have to invert a 3x3 matrix result (there are online tools for that). What they don’t tell is that the same software can also be used to calibrate the accelerometer for bias, scale factor AND misalignments.
Here is a rendering (using Google SketchUp) of the example raw data file provided with the MagCal software.

The whole idea is to first make this calibration on the completed compass in a magnetic clean environment (like an exterior isolated field).
The whole calibration procedure will be like this:
1. Record a set of static measurements (magnetometer and accelerometer) by positioning the compass in a large number of orientiations covering a whole sphere
2. Process the data in MagCal to find the calibration values (12 each for the magnetometer and the accelerometer)
3. Carefully position the compass assembly completely horizontal (use a precision level).
4. Record the accelerometer output at this position, to find the orientation of the accelerometer versus the whole compass assembly. This will be used to apply a final correction to the calibrated accelerometer values before applying the tilt compensation equations.
Note that once the compass will be installed in the boat, there may be additional hard and soft iron errors induced by the boat structure and equipment. These will be later identified with the help of the GPS, as shown in a previous post.
In Part 2 of this post, I present 'Magneto', a similar software tool which has some practical advantages compared to 'MagCal'.